Daimon Robotics and Galbot jointly launches RobOmni for benchmarking tactile perception and dexterous manipulation
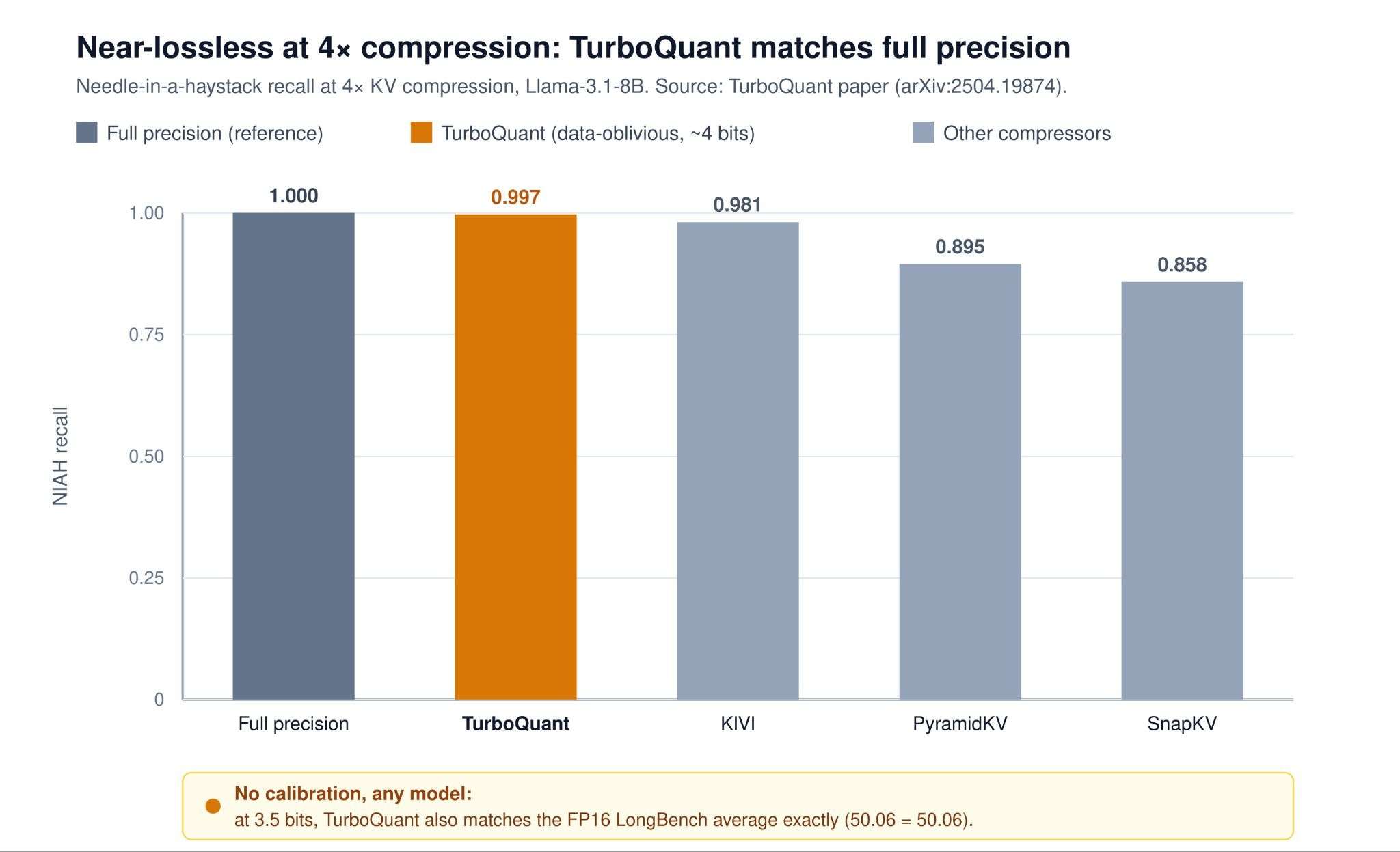
Embodied AI is evolving from vision-centric perception toward Physical AI. While vision enables robots to perceive the world, it cannot fully capture the physical interactions that underpin real-world manipulation, limiting robots’ ability to operate reliably in unstructured environments. As World Models advance, tactile sensing is increasingly recognized as a key modality. By providing critical physical feedback beyond vision, tactile helps robots understand and interact with the physical
Get smart on it
The lesson for this story is being written.
Related news
Physics AI research that’s shaping the industry.
Published breakthroughs pushing the state of the art.

GLM-5.2 is the new leading open weights model on the Artificial Analysis Intelligence Index
Benchmarks and Analysis of GLM-5.2

Why Validation Will Define the Future of HPC and AI
As AI becomes part of HPC workflows, validation, data quality, and trust are emerging as key factors in technology and buying decisions.